Robot cooperativo flexible de la serie ER
Parámetros técnicos
| ER3 | ER7 | ER3 Pro | ER7 Pro | |||||
| Especificación | ||||||||
| Carga | 3 kg | 7 kg | 3 kg | 7 kg | ||||
| radio de trabajo | 760 mm | 850 mm | 760 mm | 850 mm | ||||
| Peso muerto | Aprox. 21 kg | Aprox. 27 kg | Aprox. 22 kg | Aprox. 29 kg | ||||
| Grados de libertad | 6 juntas rotatorias | 6 juntas rotatorias | 7 juntas rotatorias | 7 juntas rotatorias | ||||
| MTBF | >35000 horas | >35000 horas | >35000 horas | >35000 horas | ||||
| Fuente de alimentación | CC 48 V | CC 48 V | CC 48 V | CC 48 V | ||||
| Programación | Interfaz gráfica y de enseñanza mediante arrastre | Interfaz gráfica y de enseñanza mediante arrastre | Interfaz gráfica y de enseñanza mediante arrastre | Interfaz gráfica y de enseñanza mediante arrastre | ||||
| Actuación | ||||||||
| FUERZA | Promedio | Valor máximo | Promedio | Valor máximo | Promedio | Valor máximo | Promedio | Cima |
| CONSUMO | 200 W | 400 W | 500 W | 900 W | 300 W | 500 W | 600 W | 1000 W |
| Seguridad | > 22 funciones de seguridad ajustables | > 22 funciones de seguridad ajustables | > 22 funciones de seguridad ajustables | > 22 funciones de seguridad ajustables | ||||
| Proceso de dar un título | Cumplir con la norma “EN ISO 13849-1, Cat. 3, PL d, Certificación CE UE”. | Cumplir con la norma “EN ISO 13849-1, Cat. 3, PL d, Certificación CE UE”. | Cumplir con la norma “EN ISO 13849-1, Cat. 3, PL d, Certificación CE UE”. | Cumplir con la norma “EN ISO 13849-1, Cat. 3, PL d, Certificación CE UE”. | ||||
| Detección de fuerza, brida de herramienta | fuerza, XyZ | Momento de fuerza, XyZ | Fuerza, xyZ | Momento de fuerza, XyZ | Fuerza, xyZ | Momento de fuerza, XyZ | Fuerza, xyZ | Momento de fuerza, xyz |
| Relación de resolución de la medición de fuerza | 0,1 N | 0,02 Nm | 0,1 N | 0,02 Nm | 0,1 N | 0,02 Nm | 0,1 N | 0,02 Nm |
| Precisión relativa del control de fuerza | 0,5 N | 0,1 Nm | 0,5 N | 0,1 Nm | 0,5 N | 0,1 Nm | 0,5 N | 0,1 Nm |
| Rango ajustable de rigidez cartesiana | 0~3000 N/m, 0~300 Nm/rad | 0~3000 N/m, 0~300 Nm/rad | 0~3000 N/m, 0~300 Nm/rad | 0~3000 N/m, 0~300 Nm/rad | ||||
| Rango de temperatura de funcionamiento | 0~40° ℃ | 0~40° ℃ | 0~40° ℃ | 0~40 ℃ | ||||
| Humedad | 20-80% de humedad relativa (sin condensación) | 20-80% de humedad relativa (sin condensación) | 20-80% de humedad relativa (sin condensación) | 20-80% de humedad relativa (sin condensación) | ||||
| 180°/s | ||||||||
| 180°/s | ±0,03 mm | ±0,03 mm | ±0,03 mm | ±0,03 mm | ||||
| 180°/s | Alcance del trabajo | Velocidad máxima | Alcance del trabajo | Velocidad máxima | Alcance del trabajo | Velocidad máxima | Alcance del trabajo | Velocidad máxima |
| 180°/s | ±170° | 180°/s | ±170° |
| ±170° | 180°/s | ±170° | 110°/s |
| Eje 2 | ±120° | 180°/s | ±120° |
| ±120° | 180°/s | ±120° | 110°/s |
| Eje 3 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Eje 4 | ±170° | 180°/s | ±170° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Eje 5 | ±120° | 180°/s | ±120° | 180°/s | ±170° | 180°/s | ±170° | 180°/s |
| Eje 6 | ±360° | 180°/s | ±360° | 180°/s | ±120° | 180°/s | ±120° | 180°/s |
| Eje 7 | ------ | ------ | ------ | ------ | ±360° | 180°/s | ±360° | 180°/s |
| Velocidad máxima en el extremo de la herramienta | ≤3 m/s | ≤2,5 m/s | ≤3 m/s | ≤2,5 m/s | ||||
| Características | ||||||||
| Grado de protección IP | IP54 | IP54 | IP54 | IP54 | ||||
| Clase de sala limpia ISO | 5 | 6 | 5 | 6 | ||||
| Ruido | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ≤70dB(A) | ||||
| Montaje de robots | Montaje formal, montaje invertido, montaje lateral | Montaje formal, montaje invertido, montaje lateral | Montaje formal, montaje invertido, montaje lateral | Montaje formal, montaje invertido, montaje lateral | ||||
| Puerto de E/S de uso general | Entrada digital 4 | Entrada digital 4 | Entrada digital 4 | Entrada digital 4 | ||||
|
| Salida digital 4 | Salida digital 4 | Salida digital 4 | Salida digital 4 | ||||
| Puerto de E/S de seguridad | Parada de emergencia externa 2 | Parada de emergencia externa2 | Parada de emergencia externa 2 | Parada de emergencia externa2 | ||||
|
| Puerta de seguridad exterior2 | Puerta de seguridad exterior 2 | Puerta de seguridad exterior 2 | Puerta de seguridad exterior 2 | ||||
| Tipo de conector de herramienta | M8 | M8 | M8 | M8 | ||||
| Fuente de alimentación de E/S de herramientas | 24 V/1 A | 24 V/1 A | 24 V/1 A | 24 V/1 A | ||||
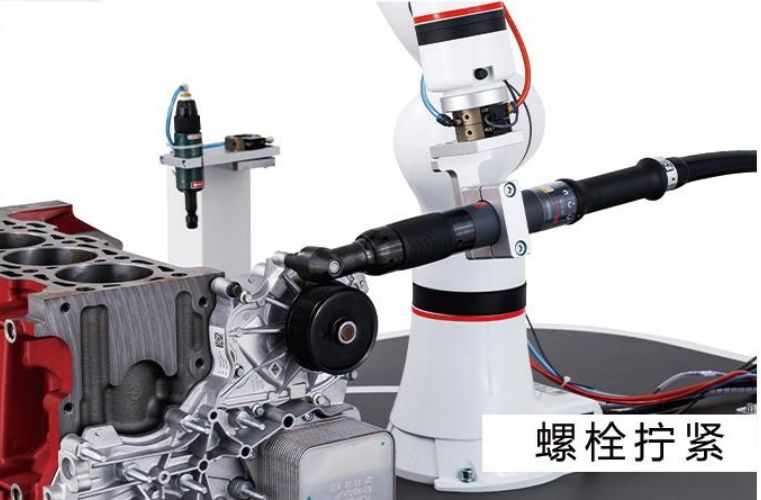
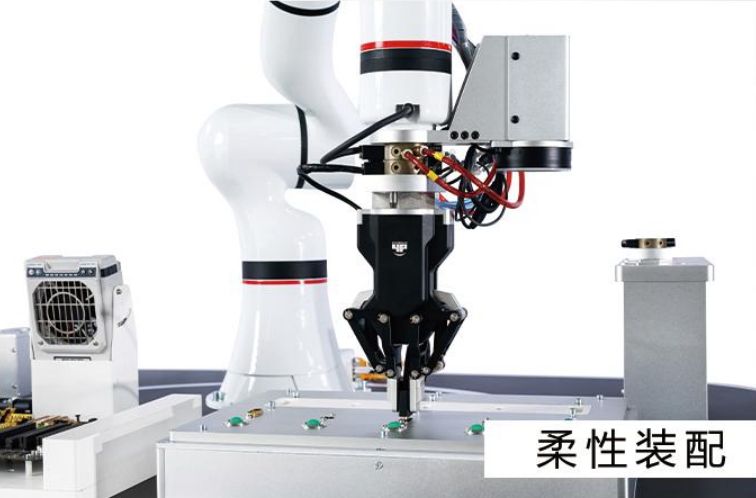
Aplicaciones industriales
Los robots colaborativos flexibles XMate son adecuados para una variedad de aplicaciones de procesos, incluyendo ensamblaje flexible, bloqueo de tornillos, inspección y medición, transporte, eliminación de recubrimientos de pegamento en materiales, cuidado de equipos, etc. Pueden ayudar a empresas de todos los tamaños a mejorar la productividad y lograr la automatización flexible.