




Servoposicionador de doble eje tipo C/L/U
Parámetros técnicos
| servoposicionador de doble eje tipo C | servoposicionador de doble eje tipo L | servoposicionador de doble eje tipo U | |||||||||||
| Número de serie | PROYECTOS | Parámetro | Parámetro | Parámetro | OBSERVACIONES | Parámetro | Parámetro | Parámetro | OBSERVACIONES | Parámetro | Parámetro | Parámetro | OBSERVACIONES |
| 1 | Carga nominal | 200 kg |
500 kg | 1000 kg | Dentro del radio R400 mm/R400 mm/R600 mm del segundo eje | 500 kg | 1000 kg | 2000 kg | Dentro del radio R400 mm/R600 mm/R800 mm del segundo eje | 1000 kg | 3000 kg | 5000 kg | Dentro de un radio de R600 mm/R1500 mm/R2000 mm del segundo eje |
| 2 | Radio de giro estándar | R400 mm | R400 mm | R600 mm |
| R400 mm | R600 mm | R800 mm |
| R600 mm | R1500 mm | R2000 mm |
|
| 3 | ángulo de giro del primer eje | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | ángulo de rotación del segundo eje | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | Velocidad de giro nominal del primer eje | 50°/s | 50°/s | 15°/s |
| 50°/s | 50°/s | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | Velocidad de rotación nominal del segundo eje | 70°/s | 70°/s | 70°/s |
| 70°/s | 70°/s | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | Precisión de posicionamiento repetible | ±0,10 mm | ±0,15 mm | ±0,20 mm |
| ±0,10 mm | ±0,10 mm | 17°/S |
| ±0,15 mm | ±0,20 mm | ±0,25 mm |
|
| 8 | Dimensiones del límite del marco de desplazamiento (largo×ancho×alto) | 1200 mm × 600 mm × 70 mm | 1600 mm × 800 mm × 90 mm | 2000 mm × 1200 mm × 90 mm |
| - | - | - |
| - | - | - |
|
| 9 | Dimensiones generales del desplazador de posición (largo×ancho×alto) | 2000 mm × 1100 mm × 1700 mm | 2300 mm × 1200 mm × 1900 mm | 2700 mm × 1500 mm × 2200 mm |
| 1500 mm × 500 mm × 850 mm | 2000 mm × 750 mm × 1200 mm | 2400 mm × 900 mm × 1600 mm |
| 4200 mm × 700 mm × 1800 mm | 5500 mm × 900 mm × 2200 mm | 6500 mm × 1200 mm × 2600 mm |
|
| 10 | Placa giratoria estándar de dos ejes | - | - | - | - | Φ800 mm | Φ1200 mm | Φ1500 mm |
| Φ1500 mm | Φ1800 mm | Φ2000 mm |
|
| 11 | Altura central de la rotación del primer eje
| 1200 mm | 1350 mm | 1600 mm |
| 550 mm | 800 mm | 1000 mm |
| 1500 mm | 1750 mm | 2200 mm |
|
| 12 | Condiciones de suministro eléctrico | Trifásico 200 V ±10 % 50 Hz | Trifásico 200 V ±10 % 50 Hz | Trifásico 200 V ±10 % 50 Hz | Con transformador de aislamiento | Trifásico 200 V ±10 % 50 Hz | Trifásico 200 V ±10 % 50 Hz | Trifásico 200 V ±10 % 50 Hz | Con transformador de aislamiento | Trifásico 200 V ±10 % 50 Hz | Trifásico 200 V ±10 % 50 Hz | Trifásico 200 V ±10 % 50 Hz | Con transformador de aislamiento |
| 13 | Clase de aislamiento | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | Peso neto del equipo | Aproximadamente 800 kg | Aproximadamente 1300 kg | Aproximadamente 2000 kg |
| Aproximadamente 900 kg | Aproximadamente 1600 kg | Aproximadamente 2500 kg |
| Aproximadamente 2200 kg | Aproximadamente 4000 kg | Aproximadamente 6000 kg | |
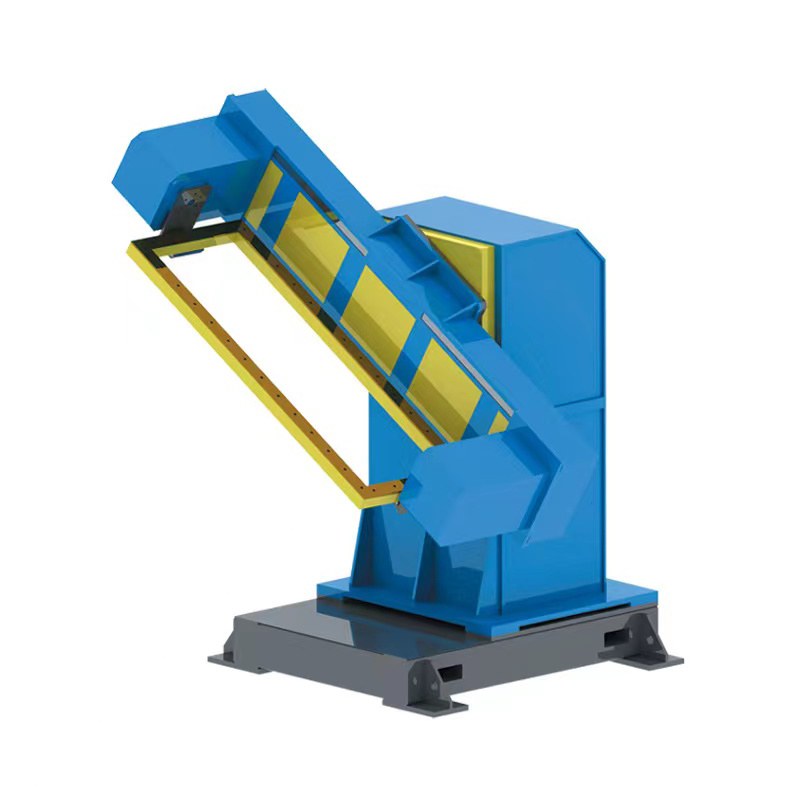
servoposicionador de doble eje tipo C
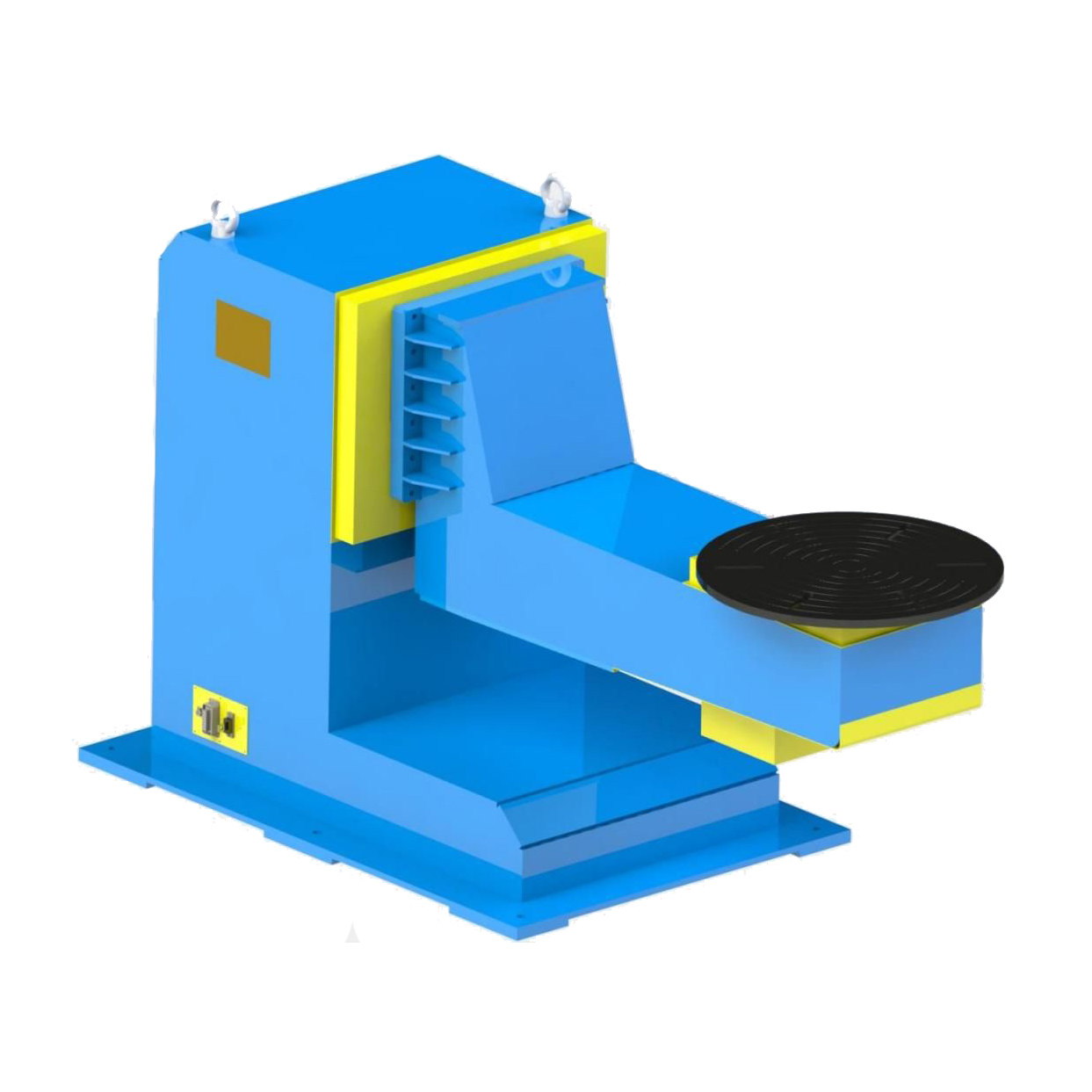
servoposicionador de doble eje tipo L

servoposicionador de doble eje tipo U
Introducción a la estructura
El posicionador servo de doble eje se compone principalmente de un bastidor integral soldado, un bastidor de desplazamiento soldado, un servomotor de CA, un reductor de precisión RV, un soporte giratorio, un mecanismo conductor, una pantalla protectora y un sistema de control eléctrico. El bastidor integral soldado se fabrica con perfiles de alta calidad. Tras un tratamiento térmico y de alivio de tensiones, se mecaniza mediante mecanizado profesional para garantizar una alta precisión de mecanizado y de posicionamiento. La superficie se recubre con pintura antioxidante, que le confiere un aspecto elegante y moderno, y el color se puede personalizar según las necesidades del cliente.
El bastidor de desplazamiento soldado se fabricará con acero perfilado de alta calidad y se procesará mediante mecanizado profesional. La superficie se mecanizará con orificios estándar para tornillos para el montaje de las herramientas de posicionamiento, y se aplicarán tratamientos de pintura, pavonado y anticorrosión.
La plataforma giratoria selecciona acero perfilado de alta calidad tras un procesamiento mecánico profesional, y la superficie se mecaniza con orificios para tornillos estándar para el montaje de herramientas de posicionamiento, y se llevará a cabo un tratamiento de ennegrecimiento y prevención de la oxidación.
La selección de un servomotor de CA y un reductor RV como mecanismo de potencia garantiza la estabilidad de rotación, la precisión de posicionamiento, una larga vida útil y una baja tasa de fallos. El mecanismo conductor está fabricado en latón, lo que le confiere una excelente conductividad. La base conductora incorpora aislamiento integral, protegiendo eficazmente el servomotor, el robot y la fuente de alimentación de soldadura.
El sistema de control eléctrico emplea un PLC Omron japonés para controlar el posicionador, lo que garantiza un rendimiento estable y una baja tasa de fallos. Los componentes eléctricos son de marcas reconocidas, tanto nacionales como internacionales, para asegurar la calidad y la estabilidad de uso.











