



Robot de estampado/apilado SDCX RMD-300/200/160/120/35/08/110/20/50
Parámetros técnicos
| Número de modelo | Grados de libertad | Modo de conducción | Carga útil (KG) | Precisión de posicionamiento repetido (mm) | Rango de movimiento (°) | Velocidad máxima (°/s) | Inercia de carga admisible de la muñeca (kg·m²)2) | Ritmo circular (ciclo/hora) | Radio de movimiento (mm) | Peso local (kg) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | servoaccionamiento de CA | 300 | ±0,5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | servoaccionamiento de CA | 200 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | servoaccionamiento de CA | 160 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | servoaccionamiento de CA | 120 | ±0,3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | servoaccionamiento de CA | 50 | ±0,2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 17002 | 2040 | 660 |
| SDCX-RMD20 | 4 | servoaccionamiento de CA | 20 | ±0,08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | servoaccionamiento de CA | 8 | ±0,08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367,5 | 0.25 | 1800① | 1433 | 180 |
Observaciones:
① La pista de prueba tiene 150 mm de alto y 1000 mm de ancho, y el tiempo de ciclo real se ve afectado por las condiciones de trabajo reales;
② La pista de prueba tiene 200 mm de alto y 1000 mm de ancho, y el tiempo de ciclo real se ve afectado por las condiciones de trabajo reales;
③ La pista de prueba tiene 400 mm de alto y 2000 mm de ancho, y el tiempo de ciclo real se ve afectado por las condiciones de trabajo reales;
Evite el contacto con gases y líquidos inflamables, explosivos y corrosivos; evite las salpicaduras de agua, aceite y polvo; manténgalo alejado de fuentes de ruido eléctrico (plasma).
Rango de movimiento
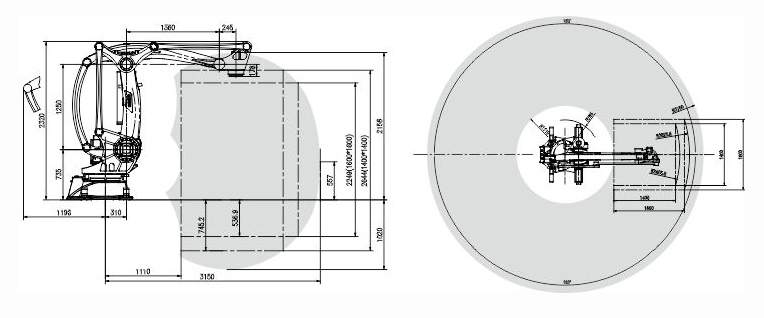
Gráfico del rango de movimiento para SDCX-RMD300/200/160/120
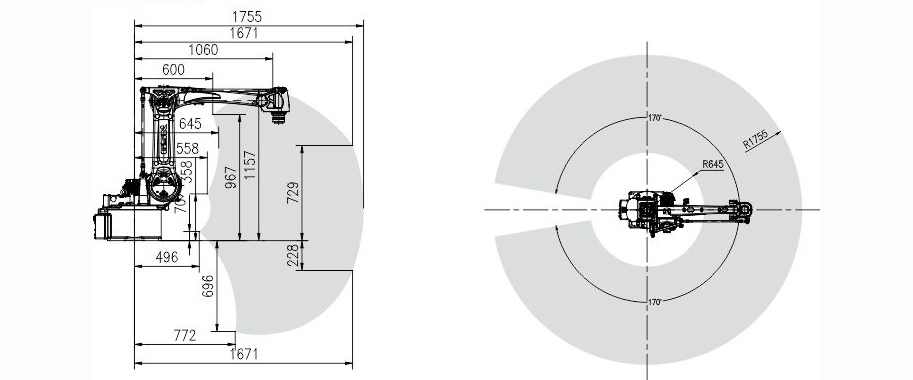
Gráfico del rango de movimiento para SDCX-RMD20
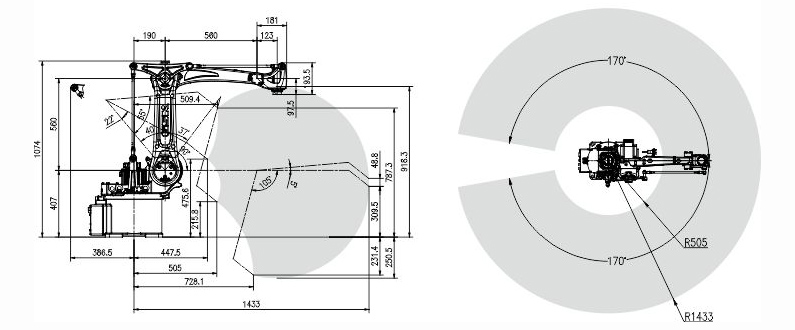
Gráfico del rango de movimiento para SDCX-RMD08
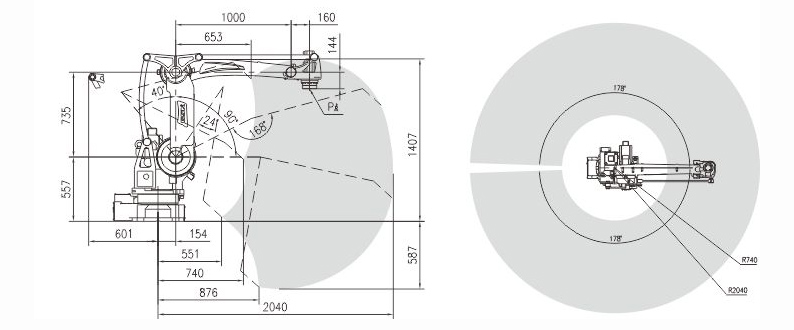
Gráfico del rango de movimiento para SDCX-RMD50
Visualización de la aplicación del producto
Soluciones
Esquema técnico del proyecto de manipulación de bobinas de acero












